Robotics Platform - SARCBOT1
This project is a robotics platform designed to help students learn about robotics and to build their own robot. The platform is based on an inexpensive ($33) 4-WD car chassis, including:
- 2 - Clear acrylic car chassis plates
- 1 - Six Volt AA battery pack
- 4 - Independent right-angle DC motor/gearbox assemblies (each with a 22-slot optical chopper-disk for position feedback)
- 4 - Wheels with tires
- 1 - Arduino Uno Microcontroller
- 1 - Arduino Sensor Shield
- 1 - YL-70 Proximity Sensor Control Board
- 4 - YL-73 Infrared Proximity Sensors
- 1 - L298N Dual Channel Motor Driver
- 1 - Mini RC Servomotor
- 1 - Ultrasonic (SONAR) Proximity Sensor
- Cables, mounting hardware and fasteners as required
- The kit was purchased on eBay from China. You can find it by searching on this dubious title: "Useful Avoid Tracking Motor Smart Robot Car Chassis 4WD Ultrasonic For Arduino". A cut down version of the kit, just the chassis and wheels, can be more readily purchased from Altronics in Australia. This might be useful for spare parts. Speaking of which: Dropping the car on its wheels would not be recommended as it might break the axels.
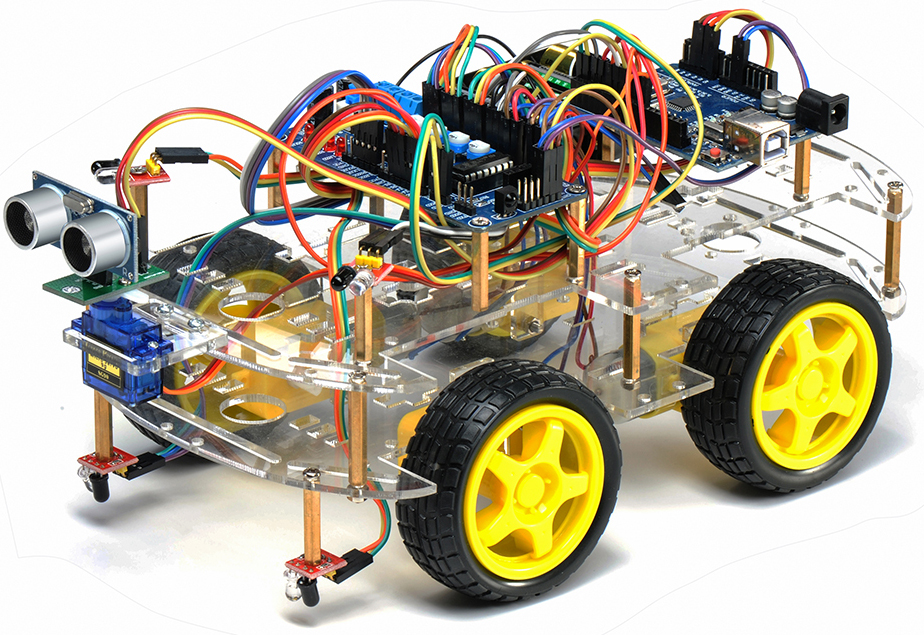
The completed 4-WD Car Kit, as it was originally designed. Note: The SARCBOT Robotics Platform differs considerably from this design.
The Arduino Uno is mounted at the rear (at the right of the picture). It controls the car. On top of the Arduino is mounted the Arduino Sensor Shield (not shown).In the middle is the L298N Motor Driver board. Also the Proximity Sensor Control board, which sets the threshold of the Infrared Proximity Sensors. There are four Infrared Proximity sensors mounted at the front of the car. The two at the top are shown being used to detect close up obstacles and the two at the bottom are being used as a line-follower. At the front of the car is a scanning Ultrasonic SONAR Proximity Sensor designed to detect obstacles. A micro RC servomotor drives the sensor from side-to-side. The four Motor/Wheel/Gearbox assemblies are mounted underneath the lower chassis plate. The kit is well made.
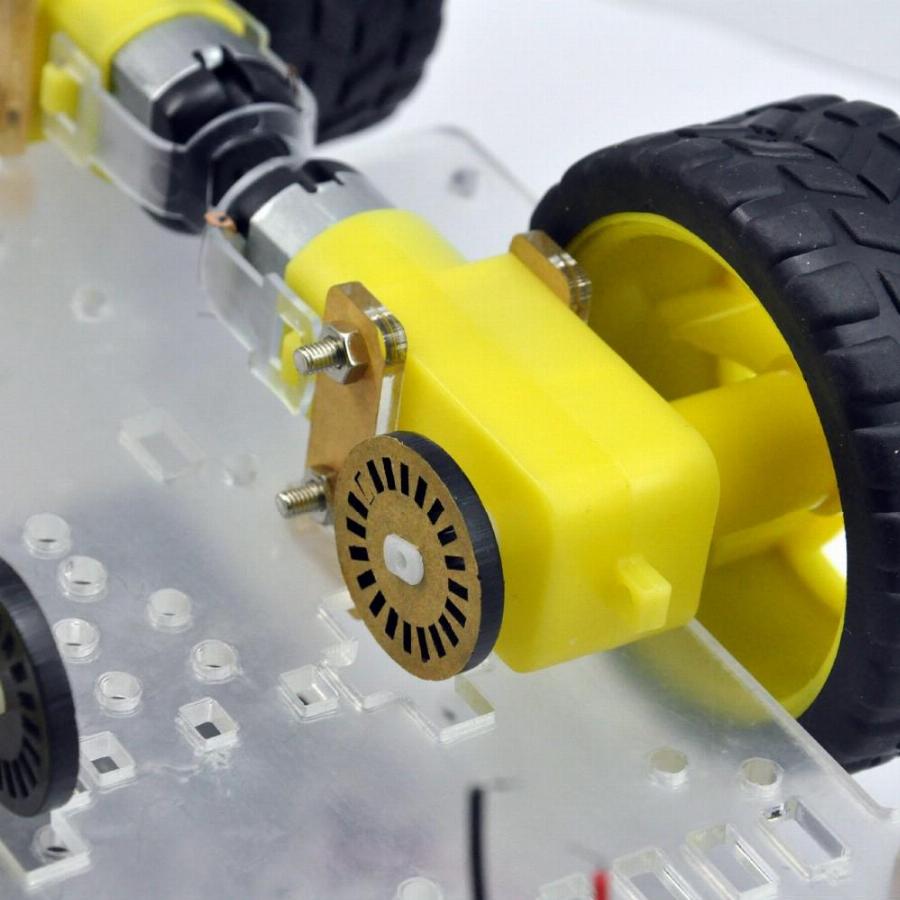
Details of the Motor/Gearbox/Wheel assembly and mounting
Note: The kit does not contain the optical interrupter devices required to use the optical chopper disk shown. There is, however, a cutout for four (4) of these devices including mounting holes.
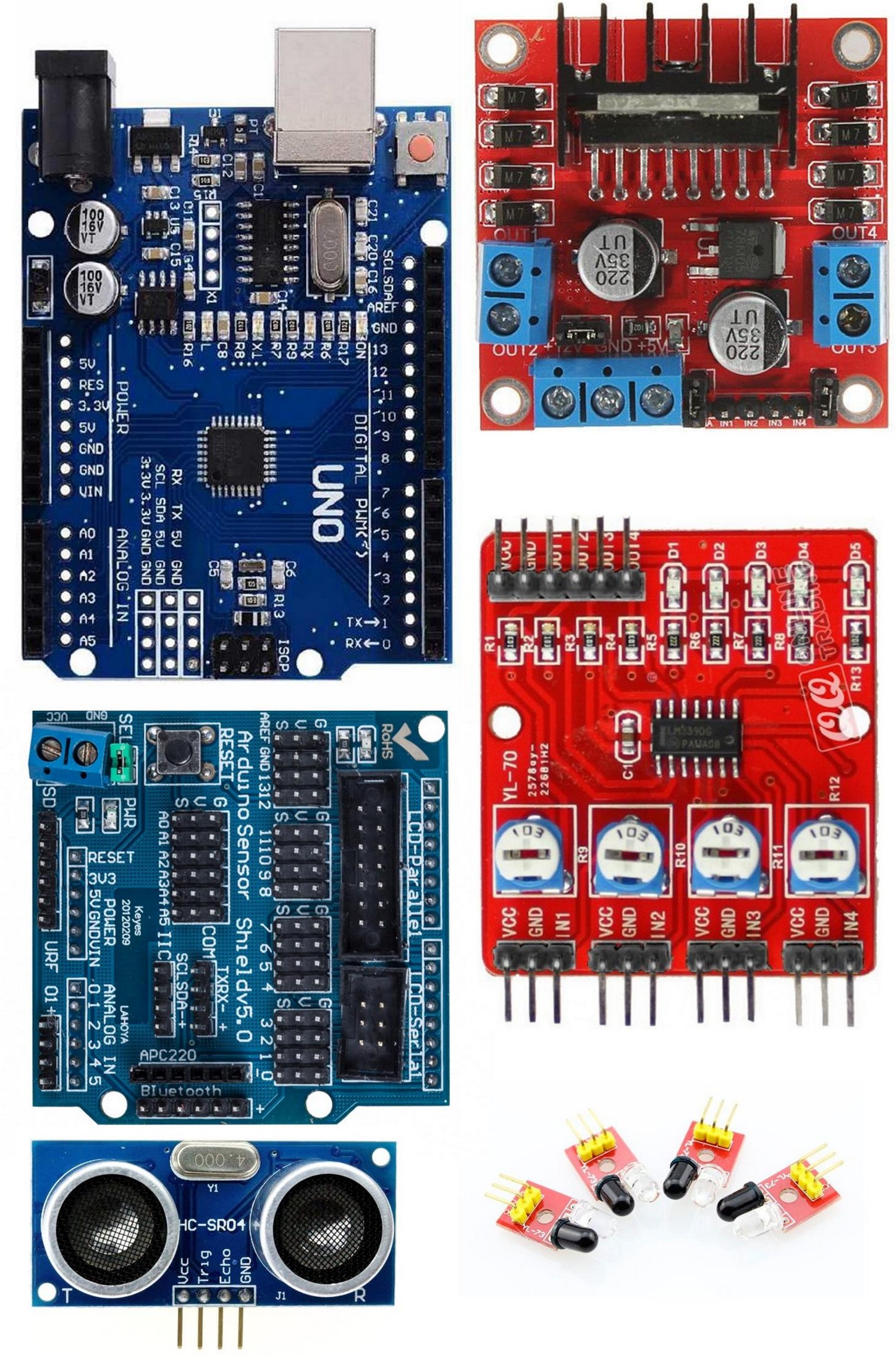
The kit contains 5 types of circuit boards including the Arduino Uno Microcontroller, the Arduino Sensor Shield, the L297N Motor Driver Board, the YL-70 Proximity Sensor Control Board, the YL-73 Infrared Proximity Sensors and the HC-SR04 Ultrasonic (SONAR) Proximity Sensor.
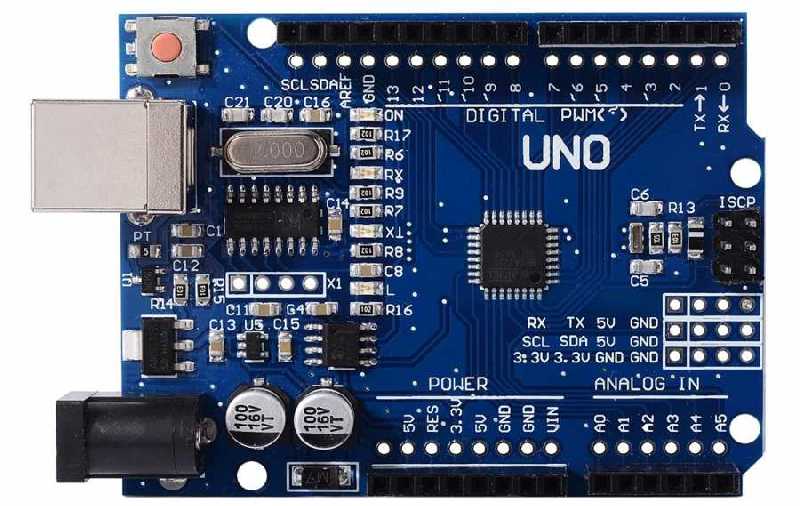
The Arduino Uno board.
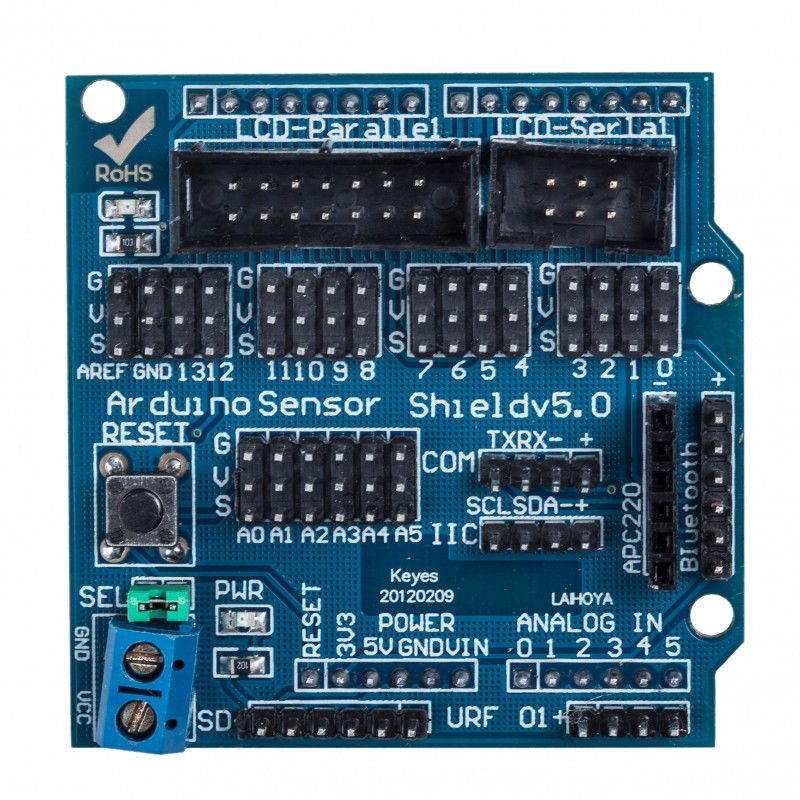
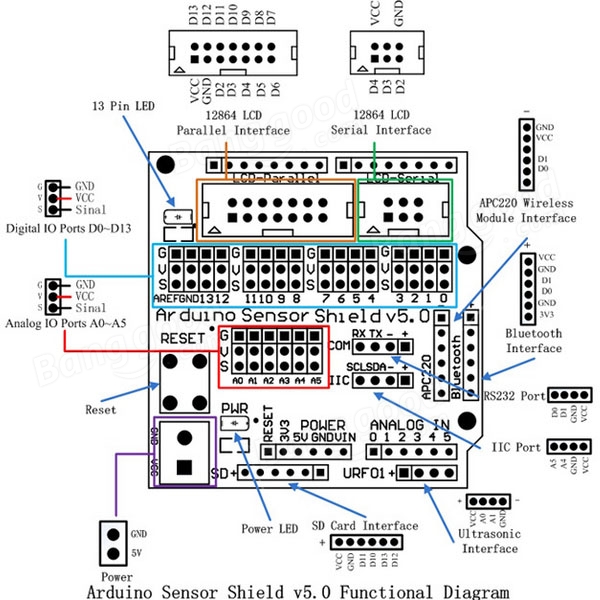
The Arduino Sensor Shield
This is a breakout board for different types of sensors, displays and devices including servomotors, analog I/O, digital I/O and serial, I2C, SPI communications ports.
The Arduino Sensor Shield schematic
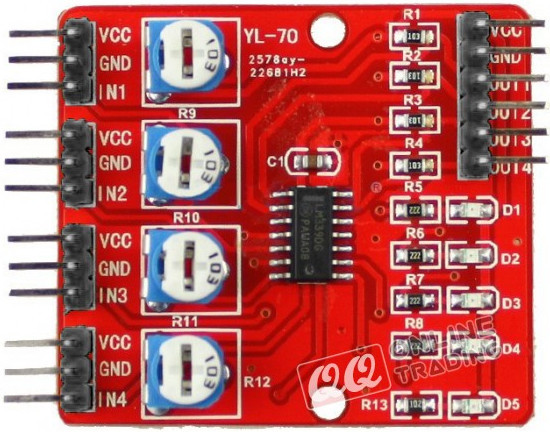
The YL-70 Proximity Sensor Control Board

The YL-70 Proximity Sensor Control Board schematic.
The board contains a quad comparator and some preset potentiometers. They set the threshold for the infrared proximity sensors.

The YL-73 Infrared Proximity Sensors

The HC-SR04 Ultrasonic (SONAR) Sensor
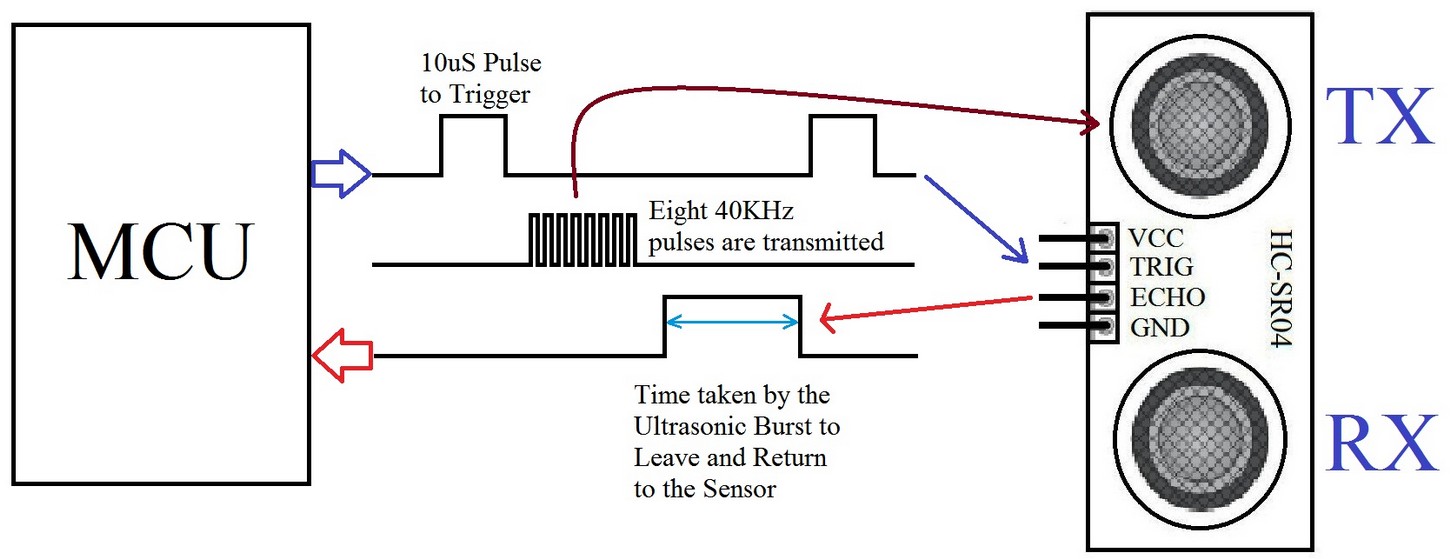
The HC-SR04 Ultrasonic (SONAR) Sensor waveforms
After a 10us trigger pulse to the TRIG input, the sensor emits eight (8) ultrasonic pulses at 40kHz. The resultant pulse width of the echo output signals the distance to the nearest target. The maximum echo pulse width of 36ms indicates no target was found.

The L298N Motor Driver Board
Note: The kit only contains one L298N Motor Driver Board. The motors on each side of the car are connected in parallel.
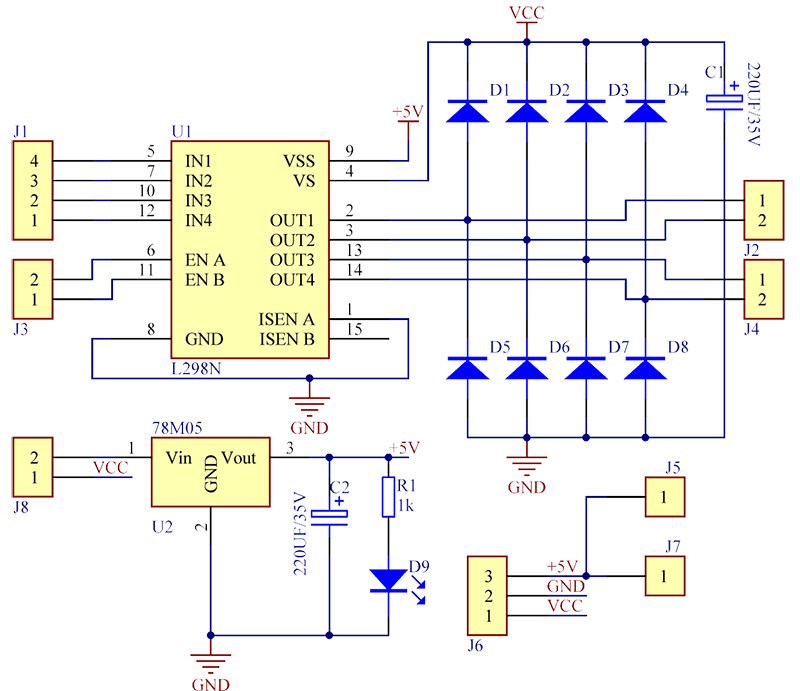
The L298N Motor Driver Board schematic
The driver has 4 independent outputs. To control a motor in the forward and reverse direction, two outputs are required per motor. Hence, one L298N Motor Driver Board can drive two motors.

The Micro RC Servo
This is used in the original design to scan the Ultrasonic Sensor module from side to side.